

CNR 2013: Exhibition: Ales Ruda (CZE)
EN:
ARBot is a small autonomous robot designed for outdoor
competitions similar to Robotour and Robotem rovne, where
robots have to get from the starting point to the destination
ideally using the shortest pathway. They move mainly along
park roads, must not ride on the lawn, avoiding onlookers, natural
and artificial obstacles and damaging flowers. It must all be done
autonomously without assistance. ARBot wins Robotour 2013.
What is hidden under the hood?
The robot is controlled by a SRV -1 module, which contains the DSP
Blackfin 537 and camera. For orientation in space the AHRS
unit VN- 100 is used. The robot has a 4WD chassis with an odometry
encoder on each wheel. GPS determines its global position and as a
last resort prior to contact with an obstacle the robot has 3
sonars. The robot is able to reach a top speed of 5km/h. A single
charge of its batteries will last for 2-3 hours of full
operation.
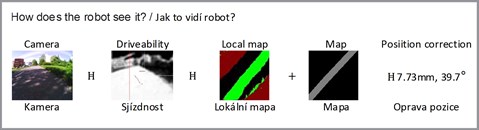
How does it work?
At the start the robot finds its position using GPS as you enter
the map from the OpenStreetMap server to determine the
shortest path to the destination. The robot constantly compares its
position on the local map with the data received from the
camera. The result of this comparison, together with the compass
direction and distance specified odometry is used to update the
position of the robot. The camera is also used to determine the
center and the edge of the road on which the robot moves. All of
this data is used to keep the robot on the path, along with sonars
that provide obstacle avoidance.
CZ:
ARBot je malý autonomní robot urcený pro outdoor souteze typu
Robotour a Robotem rovne, kde se roboty musí dostat ze startovního
místa do cíle ideálne po co nejkratsí ceste. Pohybují se predevsím
po parkových cestách, nesmí vyjet na trávník, vyhýbají se
prirozeným i umelým prekázkám a neublizují kytickám a
prihlízejícím. A to vse zcela autonomne bez cizí pomoci. ARBot
zvítezil v letosním rocníku Robotour.
Co se skrývá pod kapotou?
Robot je rízen modulem SRV-1, který obsahuje DSP BlackFin 537 a
kameru. Pro orientaci v prostoru je pouzita jednotka AHRS VN-100.
Robot má pohánená vsechna 4 kola s odometrií. Globální pozici
urcuje GPS a jako poslední záchrana pred kontaktem s prekázkou
slouzí 3 sonary. Robot je schopen dosáhnout maximální rychlosti
5km/h a na jedno nabití baterek vydrzí 2-3 hodiny plného
provozu.
Jak to celé funguje?
Na startu robot urcí svou pozici pomocí GPS, podle zadané mapy z
OpenStreetMap serveru si dohledá nejkratsí cestu k cíli. Jede podle
mapy, kterou neustále srovnává s lokální mapou budovanou na základe
údaju z kamery. Výsledek tohoto srovnání spolecne se smerem urceným
kompasem a ujetou vzdálenosti urcenou odometrií slouzí pro
aktualizaci pozice robotu. Kamera také pouzívá pro urcování stredu
a kraje cesty po které robot jede. Tyto údaje jsou slouzí pro
udrzení robota na ceste a spolu se sonary zajistují vyhýbání se
prekázkám.
Cafe Neu Romance 2013:
Program
Exhibition
Lectures
Films
& AV
Seminars
Workshops
Events

Ales Ruda is a Czech DIY/Maker, educated as an electroengineer from the Czech Technical University.
ARBot
In Prague Alex Ruda will present his
ARBot during the Cafe Neu Romance festival (27-30 November
2013) at Galerie NTK.
Galerie NTK
Technická 6
16080 Prague.